Návrat do výchozí pozice (rth – return-to-home) – DJI Mavic Pro Uživatelská příručka
Stránka 13
Dr
on
©
2016 DJI Všechna práva vyhrazena.
13
Uživatelská příručka
Mavic Pro
Návrat do výchozí pozice (RTH – Return-to-Home)
Funkce návratu do výchozí pozice (RTH) přesune dron do poslední zaznamenané výchozí pozice
K dispozici jsou tři typy funkce RTH: Funkce inteligentního návratu RTH, funkce návratu RTH při
vybitém akumulátoru a funkce bezpečného nouzového návratu RTH. Tato část popisuje tyto tři scénáře
podrobně.
GPS
Popis
Výchozí
pozice
Pokud byl před vzletem obdržen silný signál systému GPS, je
výchozí pozice nastavena jako místo, ze kterého dron vzlétl.
Síla signálu systému GPS je indikována ikonou GPS (
). Při
záznamu výchozí pozice bude kontrolka stavu dronu rychle blikat.
Funkce bezpečného nouzového návratu RTH
Pokud byla výchozí pozice úspěšně zaznamenána a kompas normálně pracuje, funkce bezpečného
nouzového návratu RTH bude automaticky aktivována, pokud dojde k výpadku signálu vysílače na
stanovenou dobu (3 sekundy při použití vysílače a 20 sekund při použití Wi-Fi). Funkce bezpečného
nouzového návratu RTH může být vypnuta pilotem, což mu umožní znovu převzít kontrolu na letem,
když je obnoveno spojení vysílače s dronem.
Dron se nemůže vrátit do výchozí pozice, pokud je signál systému GPS slabý ([
] je
zobrazen šedě) nebo není dostupný vůbec.
V režimu bezpečného nouzového návratu RTH, kdy je vypnut systém předního vidění, se
dron nemůže vyhýbat překážkám. Je důležité, abyste před každým letem nastavili vhodnou
bezpečnou výšku. Spusťte aplikaci DJI GO 4, aktivujte nabídku „Camera“ (Kamera) a klepněte
na tlačítko a nastavte výšku bezpečného návratu.
Během stoupání dronu do výšky bezpečného návratu nemůže operátor dron ovládat. Může
však jedním stiskem tlačítka RTH ukončit stoupání a znovu převzít nad dronem kontrolu.
Když je zapnut systém předního vidění a je k dispozici dostatečné osvětlení, dron dokáže
detekovat překážky a vyhýbat se jim. Dron automaticky vystoupá do výšky, aby se vyhnul
překážkám, a v této nové výšce přelétne do výchozí pozice. Aby se dron vrátil do výchozí
pozice dopředným letem, nesmí se otáčet nebo letět vlevo či vpravo v režimu RTH, když je
povolen systém předního vidění.
Systém předního vidění lze zapnout pouze během letu nebo v režimu RTH.
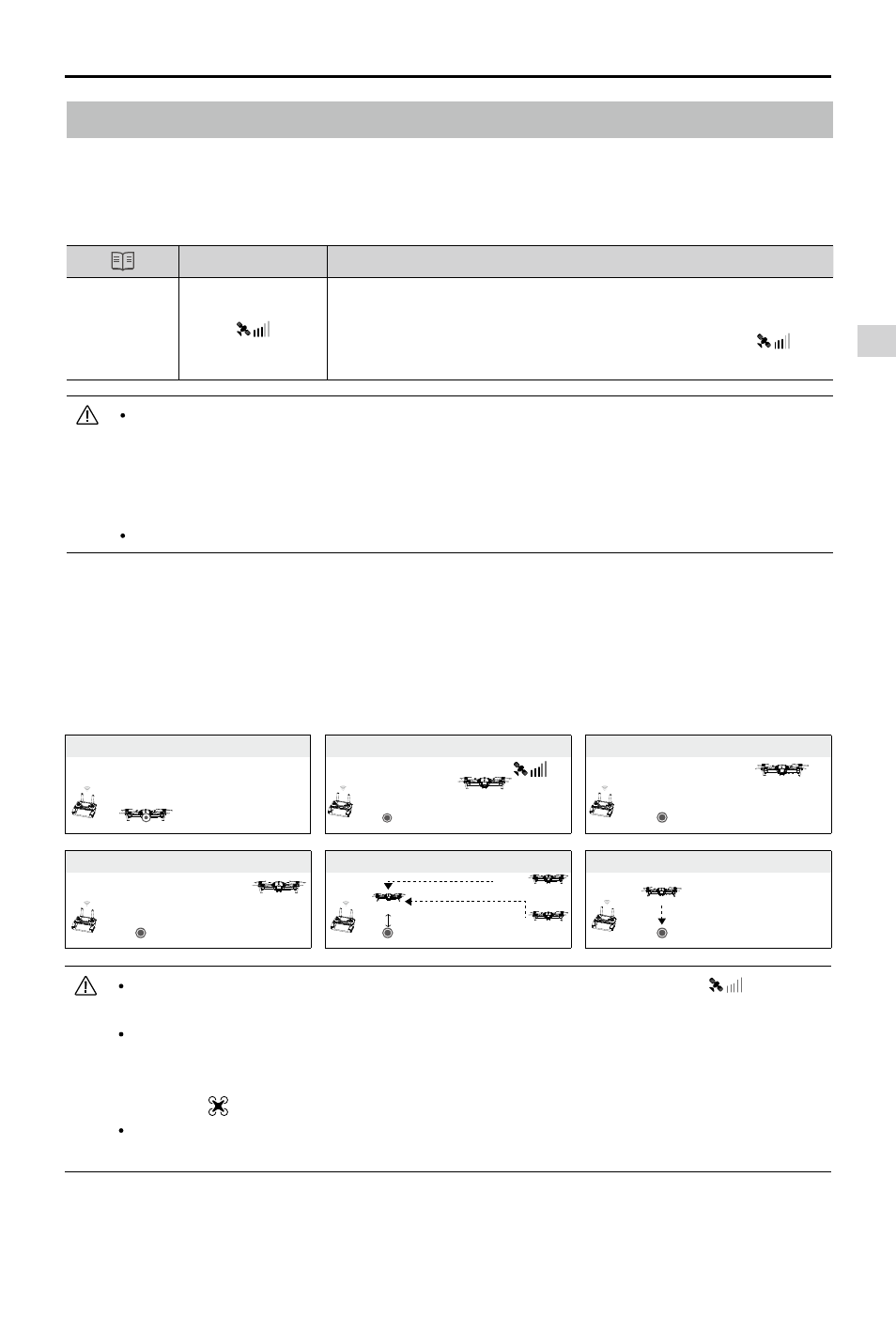
1. Záznam výchozí pozice
3. Výpadek signálu vysílače
2. Potvrzení výchozí pozice
6. Přistání (po přistání potvrzeném uživatelem)
4. Výpadek signálu po delší dobu
×
×
5 RTH (nastavitelná výška)
Výška nad výchozí pozicí <= Výška bezpečného návratu
Výška nad výchozí pozicí > Výška bezp. návratu
Stoupání na výšku bezpečného návratu
Výška bezpečného návratu
×
×
Vis ve výšce 2 metry nad
výchozí pozicí