Účinek – HEIDENHAIN 530 (340 49x-07) Cycle programming Uživatelská příručka
Stránka 295
HEIDENHAIN iTNC 530
295
11
.9 ROVINA OBRÁB
Ě
NÍ (cyklus 19, DIN/ISO: G80, V
o
litelný sof
tware 1)
11.9 ROVINA OBRÁBĚNÍ (cyklus 19,
DIN/ISO: G80, Volitelný
software 1)
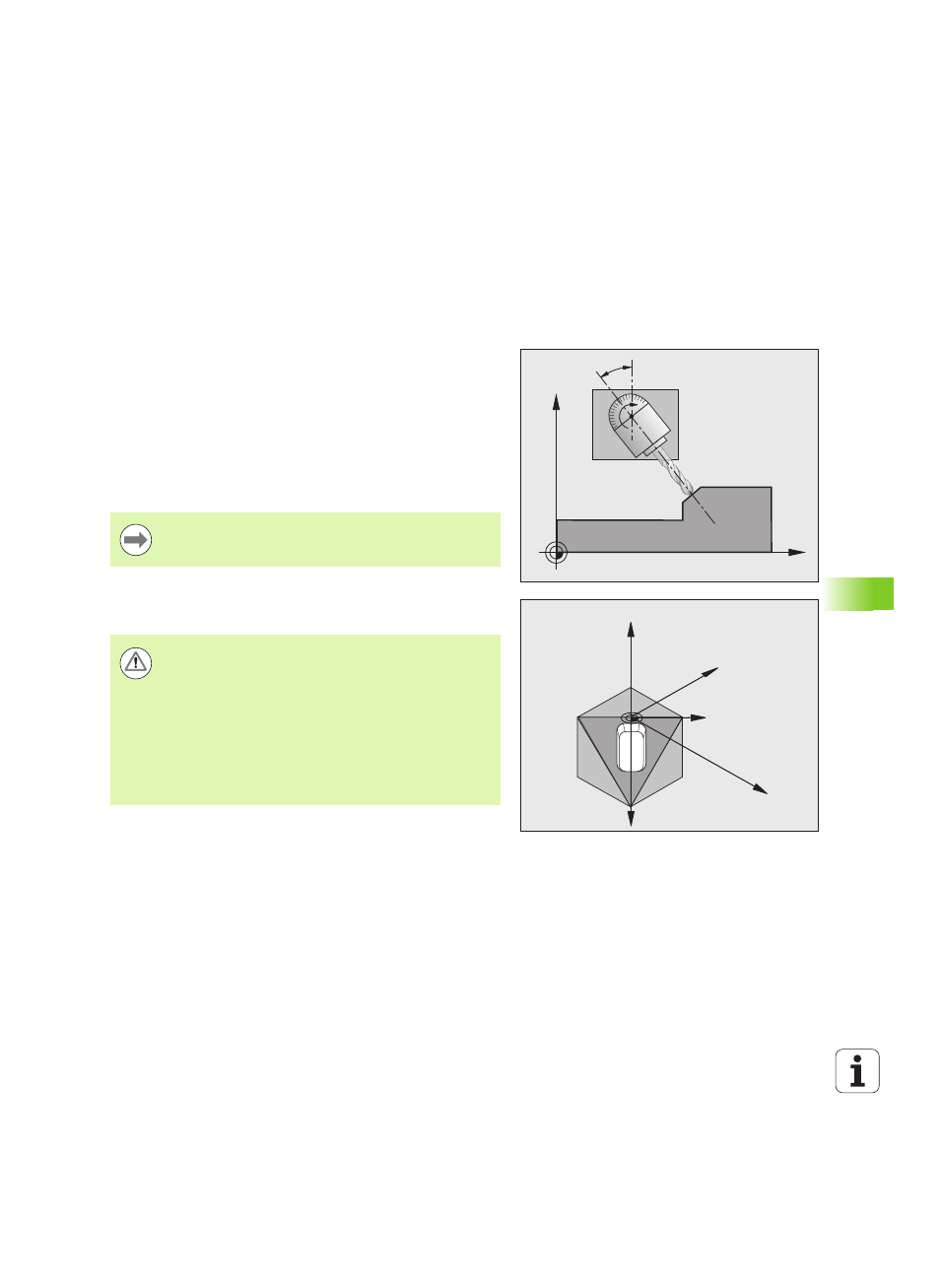
Účinek
V cyklu 19 definujete polohu roviny obrábění – rozuměj polohu osy
nástroje vztaženou k pevnému souřadnému systému stroje – zadáním
úhlů naklopení. Polohu roviny obrábění můžete definovat dvěma
způsoby:
Přímo zadat polohu naklopených os
Popsat rovinu obrábění až třemi natočeními (prostorový úhel)
pevného souřadného systému stroje. Prostorové úhly, které je
třeba zadat, dostanete tím, že proložíte řez svisle naklopenou
rovinou obrábění a tento řez pozorujete z té osy, kolem níž chcete
naklápět. Každá libovolná poloha nástroje v prostoru je zcela
jednoznačně definována již dvěma prostorovými úhly.
Programujete-li polohu roviny obrábění pomocí prostorových úhlů,
vypočte si TNC k tomu potřebná úhlová nastavení naklopených os
automaticky a uloží je v parametrech Q120 (osa A) až Q122 (osa C).
Pořadí natočení pro výpočet polohy roviny je stanoveno: nejdříve TNC
natočí osu A, potom osu B a nakonec osu C.
Cyklus 19 je účinný od své definice v programu. Jakmile některou osou
v naklopeném systému popojedete, je účinná korekce pro tuto osu.
Má-li se započíst korekce ve všech osách, pak musíte popojet všemi
osami.
Pokud jste v Ručním provozním režimu nastavili funkci Naklopení
za chodu programu na Aktivní pak se přepíše hodnota úhlu v této
nabídce hodnotou z cyklu 19 ROVINA OBRÁBĚNÍ.
Z
X
B
X
Z
Y
X'
Y'
Uvědomte si, že poloha naklopeného souřadného
systému a tím i pojezdové pohyby v naklopeném systému
závisí na tom, jak naklopenou rovinu popíšete.
Pozor nebezpečí kolize!
V závislosti na konfiguraci vašeho stroje jsou při definici
prostorového úhlu početně možná dvě řešení (pozice os).
Zkontrolujte na vašem stroji příslušným testem kterou
pozici os program TNC zvolil.
Máte-li k dispozici volitelný software DCM, tak můžete
nechat při testu programu zobrazit příslušnou pozici os v
náhledu PROGRAM+KINEMATIKA (viz příručka pro
uživatele popisného dialogu Dynamické monitorování
kolize).