HEIDENHAIN TNC 426B (280 472) Touch Probe Cycles Uživatelská příručka
Stránka 48
36
3 Cykly sn mac sondy pro automatickou kontrolu polohy obrobku
3.1 Aut
o
ma
tic
k
é zjiš
těn š
ikmé p
o
loh
y o
b
ro
b
k
u
U
U
U
U
1. měřic bod 1. osy Q263 (absolutně): souřadnice
prvn ho dotykového bodu v hlavn ose obráběc
roviny
U
U
U
U
1. měřic bod 2. osy Q264 (absolutně): souřadnice
prvn ho dotykového bodu ve vedlejš ose obráběc
roviny
U
U
U
U
2. měřic bod 1. osy Q265 (absolutně): souřadnice
druhého dotykového bodu v hlavn ose obráběc
roviny
U
U
U
U
2. měřic bod 2. osy Q266 (absolutně): souřadnice
druhého dotykového bodu ve vedlejš ose obráběc
roviny
U
U
U
U
Osa měřen Q272: osa v n ž se maj měřen
provádět:
1: hlavn osa = osa měřen
2: vedlejš osa = osa měřen
3: osa dotykové sondy = osa měřen
U
U
U
U
Směr pojezdu 1 Q267: směr př jezdu dotykové
sondy k obrobku:
1: směr pojezdu negativn
+1: kladný směr pojezdu
U
U
U
U
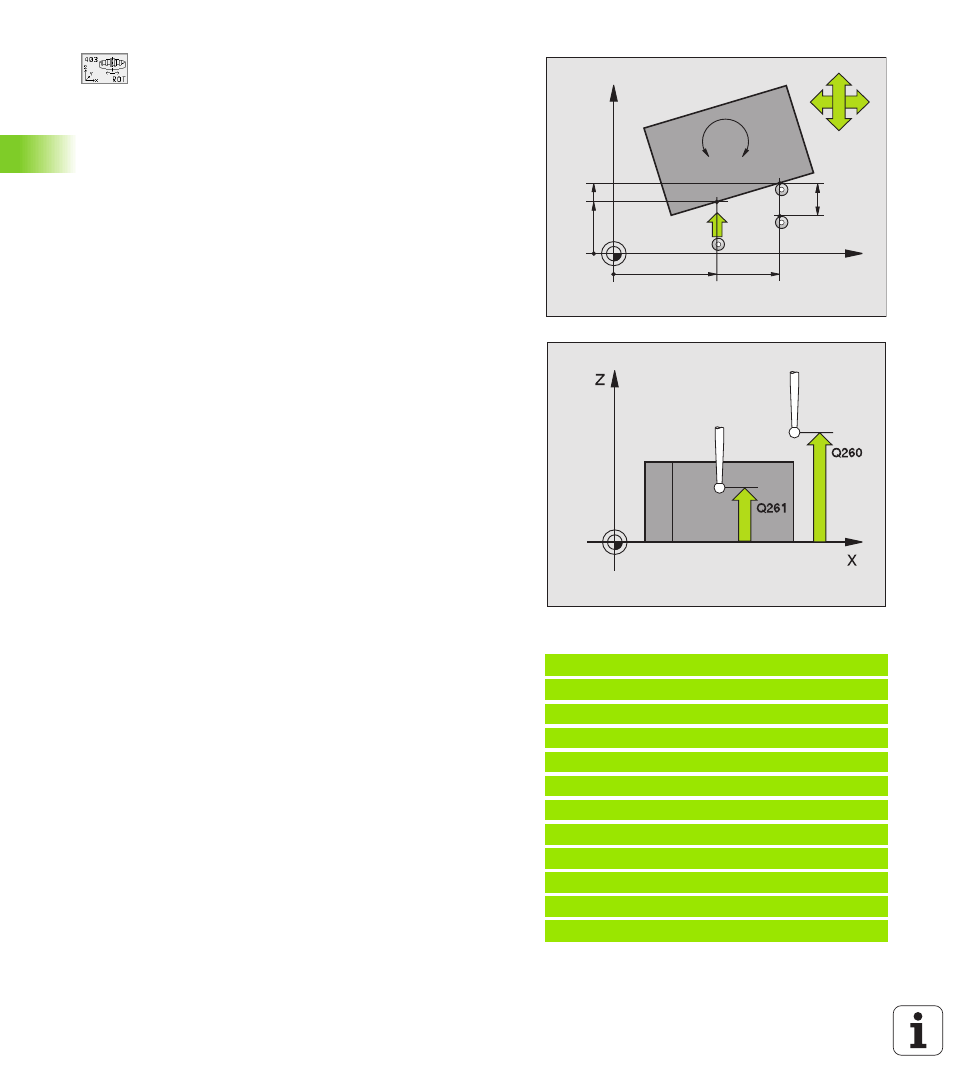
Výška měřen v ose dotykové sondy Q261
(absolutně): souřadnice středu kuličky (= bod
dotyku) v ose dotykové sondy, na které se má
měřen provádět
U
U
U
U
Bezpečnostn vzdálenost Q320 (inkrementálně):
př davná vzdálenost mezi měřic m bodem a kuličkou
dotykové sondy. Q320 se přič tá k MP6140
U
U
U
U
Bezpečná výška Q260 (absolutně): souřadnice v
ose dotykové sondy, v n ž nemůže doj t ke kolizi mezi
dotykovou sondou a obrobkem (up nac m
zař zen m)
U
U
U
U
Odjet na bezpečnou výšku Q301: stanoven , jak
má dotyková sonda mezi měřic mi body poj ždět:
0: mezi měřic mi body přejet na měřic výšce
1: mezi měřic mi body přejet na bezpečnou výšku
U
U
U
U
Osa pro vyrovnávac pohyb Q312: definujte, v
které ose natáčen má TNC kompenzovat změřenou
šikmou polohu:
4: kompenzovat šikmou polohu v ose natáčen A
5: Kompenzovat šikmou polohu v ose natáčen B
6: kompenzovat šikmou polohu v ose natáčen C
Př klad: NC bloky
5 TCH PROBE 403 ROT V OSE C
Q263=+0 ;1. BOD 1. OSA
Q264=+0 ;1. BOD 2. OSA
Q265=+20 ;2. BOD 1. OSA
Q266=+30 ;2. BOD 2. OSA
Q272=1 ;OSA MERENI
Q267=+1 ;SMER POJEZDU
Q261= 5 ;VYSKA MERENI
Q320=0 ;BEZPECNOSTNI VZDALENOST
Q260=+20 ;BEZPECNA VYSKA
Q301=0 ;JET NA BEZPECNOU VYSKU
Q312=6 ;OSA VYROVNANI
X
Y
Q266
Q264
Q263
Q272=1
Q265
Q272=2
+
–
–
+
Q267
MP6140
+
Q320
A
B
C