1 základy – HEIDENHAIN TNC 426 (280 462) Uživatelská příručka
Stránka 40
27
HEIDENHAIN TNC 426
Vztažný systém
Se vztažným systémem nadefinujete jednoznačně polohy v rovině
nebo v prostoru. Údaj polohy se vztahuje vždy k pevnému bodu a je
popsán souřadnicemi.
V pravoúhlém systému (kartézský systém) jsou definovány tři směry
jako osy X, Y a Z. Osy jsou vzájemně na sebe kolmé a prot naj se v
jednom bodě, v počátku. Souřadnice udává vzdálenost od počátku
v jednom z těchto směrů. Tak se dá popsat poloha v rovině pomoc
dvou souřadnic a v prostoru pomoc tř souřadnic.
Souřadnice, které se vztahuj k počátku, se označuj jako absolutn
souřadnice. Relativn souřadnice se vztahuj k libovolné jiné poloze
(vztažnému bodu) v souřadném systému. Relativn hodnoty
souřadnic se označuj též jako inkrementáln (př růstkové) hodnoty
souřadnic.
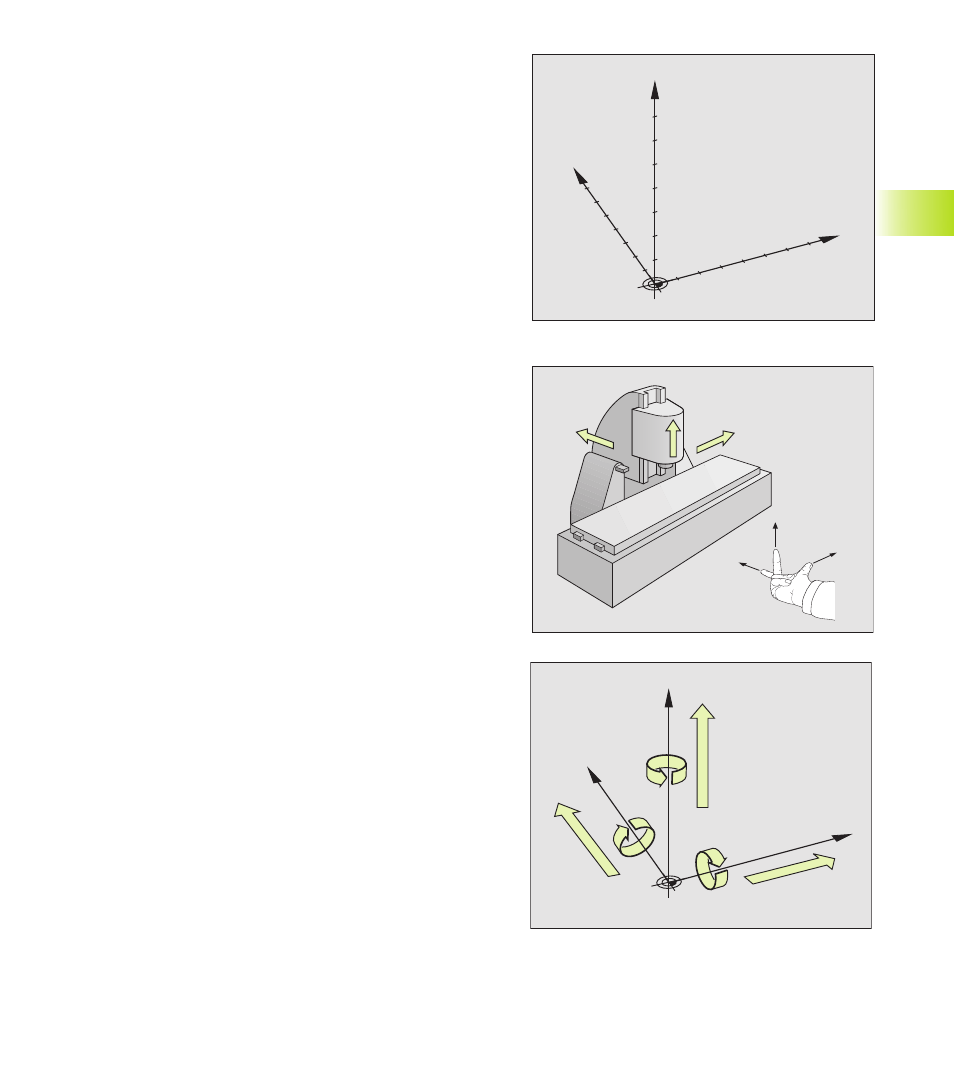
Vztažný systém u frézky
Při obráběn obrobku na frézce se obecně orientujte na pravoúhlý
souřadný systém. Obrázek vpravo zobrazuje, jak je pravoúhlý
souřadný systém přiřazen strojn m osám. Pravidlo tř prstů pravé ruky
slouž jako pomůcka: jestliže prostředn k směřuje ve směru osy
nástroje od obrobku k nástroji, pak označuje směr Z+, palec směr
X+ a ukazováček směr Y+.
TNC 426 může ř dit celkem maximálně 5 os. Vedle hlavn ch os X, Y a
Z existuj s nimi rovnoběžné př davné osy U, V a W. Rotačn osy se
označuj jako A, B a C. Obrázek dole zobrazuje přiřazen př davných
os popř. rotačn ch os hlavn m osám.
4.1 Základy
W+
C+
B+
V+
A+
U+
Y
X
Z
Y
X
Z
+X
+Y
+Z
+X
+Z
+Y