1 smart.t u rn units – HEIDENHAIN SW 54843x-03 DIN Programming Uživatelská příručka
Stránka 65
HEIDENHAIN MANUALplus 620, CNC PILOT 640
65
2.1 smart.T
u
rn UNITS
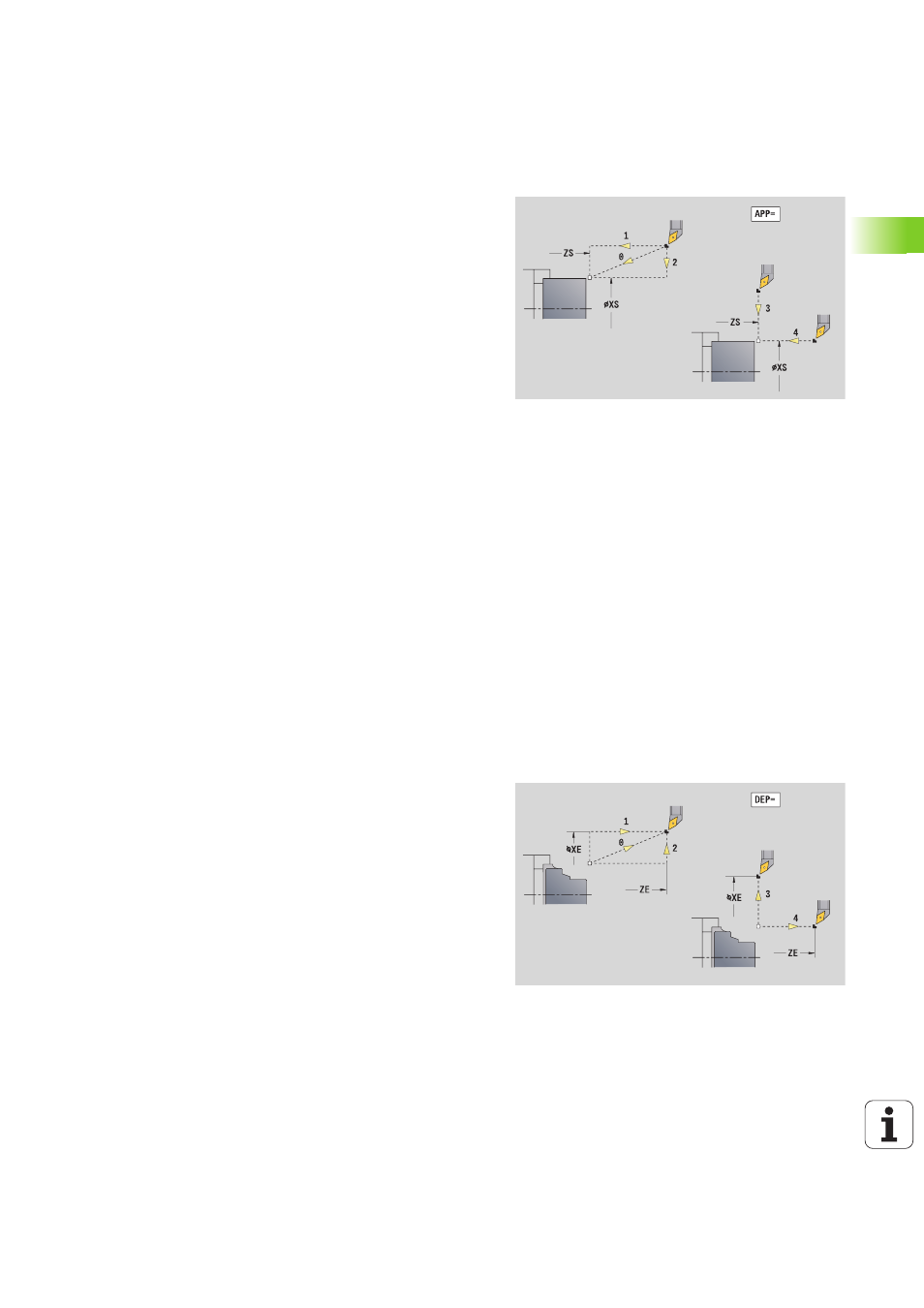
Formulář AppDep (Nájezd/Odjezd)
V tomto formuláři se definují pozice a varianty najíždění a odjíždění.
Najíždění: Ovlivnění strategie najíždění.
Odjíždění: Ovlivnění strategie odjíždění (platí také pro funkce v ose
Y).
Parametry „Nájezdu“
APP
Varianty nájezdu:
Bez osy (vypnout funkci nájezdu)
0: Simultánně (osy X a Z najíždějí diagonálně)
1: Nejprve X, pak Z
2: Nejprve Z, pak X
3: Jen X
4: Jen Z
XS, ZS
Poloha nájezdu: Pozice špičky nástroje před vyvoláním
cyklu
Dodatečně při obrábění v ose C:
CS
Poloha nájezdu: Poloha v ose C, která se najede před
vyvoláním cyklu s G110.
Parametr „Nájezd v ose Y“
APP
Varianty nájezdu:
Bez osy (vypnout funkci nájezdu)
0: Simultánně (osy X a Z najíždějí diagonálně)
1: Nejprve X, pak Z
2: Nejprve Z, pak X
3: Jen X
4: Jen Z
5: Pouze směr Y
6: Současně s Y (osy X, Y a Z najíždějí diagonálně)
XS, YS,
ZS
Poloha nájezdu: Pozice špičky nástroje před vyvoláním
cyklu
CS
Poloha nájezdu: Poloha v ose C, která se najede před
vyvoláním cyklu s G110.
Parametr „Odjíždění“
DEP
Varianty odjíždění:
Bez osy (vypnout funkci odjezdu)
0: Simultánně (osy X a Z odjíždějí diagonálně)
1: Nejprve X, pak Z
2: Nejprve Z, pak X
3: Jen X
4: Jen Z
XE, ZE Poloha odjezdu: Poloha špičky nástroje před jízdou do bodu
výměny nástroje