13 jednoduché přímkové a kruhové pohyby, Přímý pohyb g1 – HEIDENHAIN CNC Pilot 4290 V7.1 Uživatelská příručka
Stránka 189
HEIDENHAIN CNC PILOT 4290
189
4.13 Jednoduché p
římkové a kruhové pohyby
4.13 Jednoduché přímkové a
kruhové pohyby
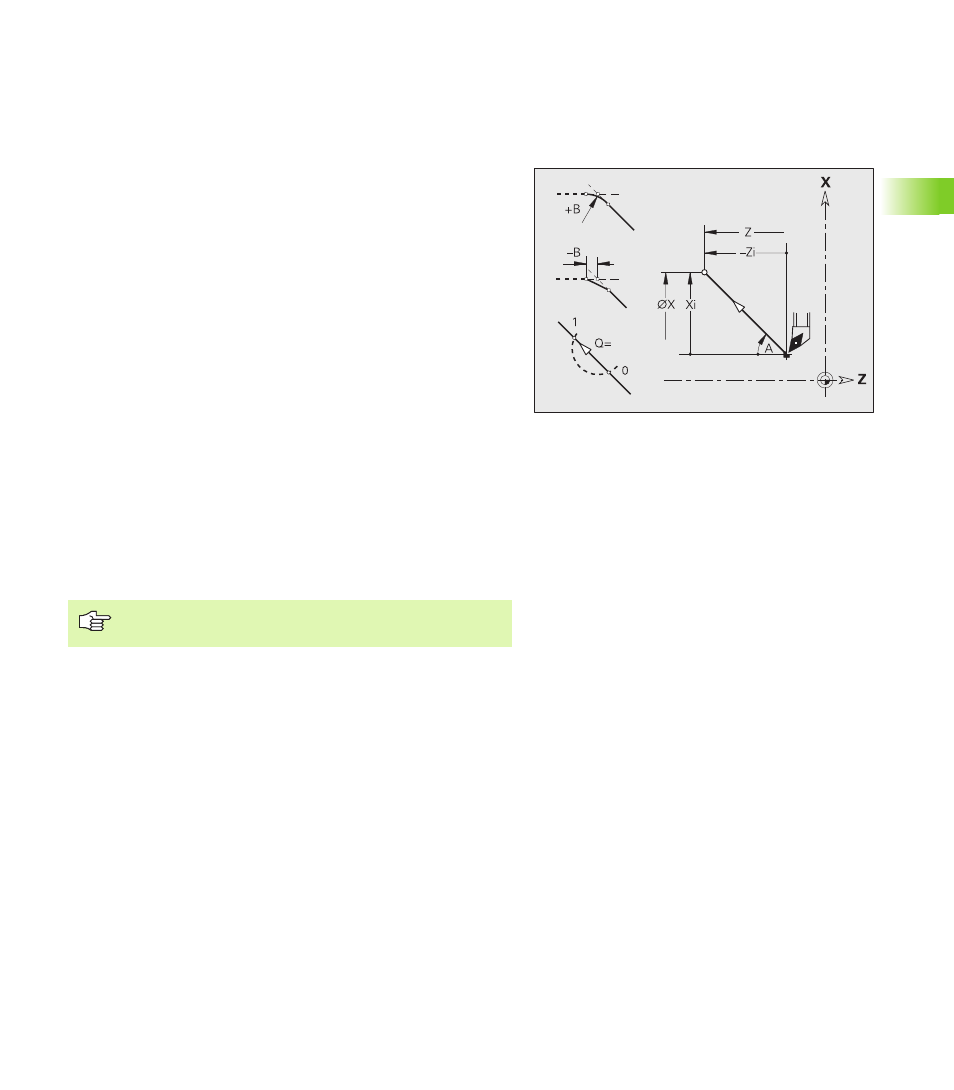
Přímý pohyb G1
G1 pojíždí daným posuvem přímo do „koncového bodu“.
Parametry
X
Koncový bod (průměr)
Z
Koncový bod
A
Úhel (směr úhlu: viz pomocný obrázek)
Q
Průsečík. Koncový bod, pokud dráha protíná oblouk kružnice
(standardně: 0):
Q = 0: bližší průsečík
Q = 1: vzdálenější průsečík
B
Zkosení / zaoblení. Definuje přechod k dalšímu obrysovému
prvku. Zadáváte-li zkosení / zaoblení, programujte teoretický
koncový bod.
Bez zadání: Tangenciální přechod
B = 0: Netangenciální přechod
B>0: Rádius zaoblení
B<0: Šířka zkosení
E
Koeficient speciálního posuvu pro zkosení/zaoblení
(standardně: 1)
Speciální posuv = aktivní posuv * E (0 < E <= 1)
Programování X, Z: absolutní, přírůstkové, samodržné
nebo „?“