Kruhový pohyb g2/g3, 13 jednoduché p římkové a kruhové pohyby – HEIDENHAIN CNC Pilot 4290 V7.1 Uživatelská příručka
Stránka 190
190
4.13 Jednoduché p
římkové a kruhové pohyby
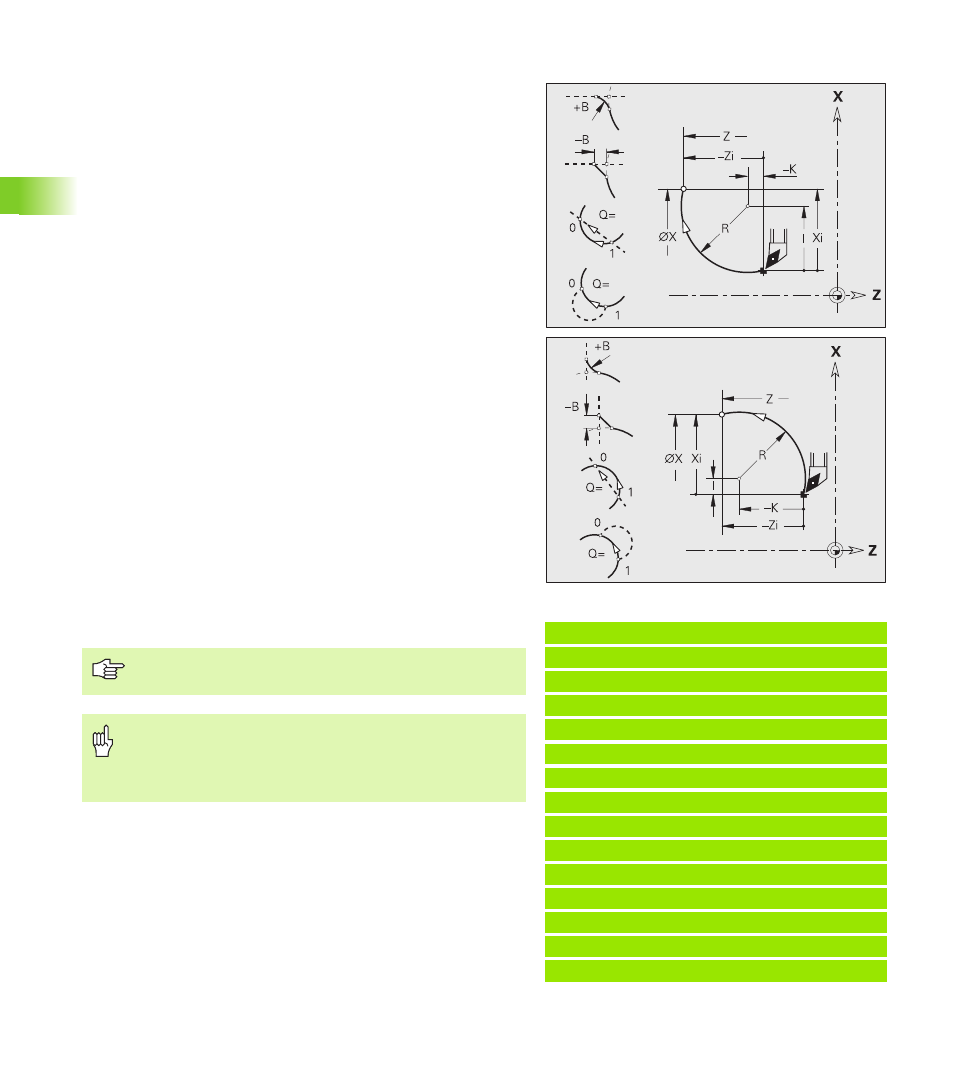
Kruhový pohyb G2/G3
G2 / G3 pojíždí po kruhu posuvem do „Koncového bodu“. Kótování
středu se provádí přírůstkově. Směr otáčení (viz pomocný obrázek):
G2: ve smyslu hodinových ručiček
G3: proti smyslu hodinových ručiček
Przykład: G2, G3
. . .
N1 T3 G95 F0.25 G96 S200 M3
N2 G0 X0 Z2
N3 G42
N4 G1 Z0
N5 G1 X15 B-0.5 E0.05
N6 G1 Z-25 B0
N7 G2 X45 Z-32 R36 B2
N8 G1 A0
N9 G2 X80 Z-80 R20 B5
N10 G1 Z-95 B0
N11 G3 X80 Z-135 R40 B0
N12 G1 Z-140
N13 G1 X82 G40
. . .
Parametry
X
Koncový bod (průměr)
Z
Koncový bod
R
Rádius (0 < R <= 200 000 mm)
I
Střed přírůstkově (vzdálenost výchozí bod – střed; jako rozměr
poloměru)
K
Střed přírůstkově (vzdálenost výchozí bod – střed)
Q
Průsečík. Koncový bod, pokud oblouk protíná přímku nebo
oblouk kružnice (standardně: 0):
Q = 0: bližší průsečík
Q = 1: vzdálenější průsečík
B
Zkosení / zaoblení. Definuje přechod k dalšímu obrysovému
prvku. Zadáváte-li zkosení / zaoblení, programujte teoretický
koncový bod.
Bez zadání: Tangenciální přechod
B = 0: Netangenciální přechod
B>0: Rádius zaoblení
B<0: Šířka zkosení
E
Koeficient speciálního posuvu pro zkosení / zaoblení
(standardně: 1)
Speciální posuv = aktivní posuv * E (0 < E <= 1)
Programování X, Z: absolutní, přírůstkové, samodržné
nebo „?“
Pozor nebezpečí kolize!
Pokud se parametry adresy vypočítávají s „V-
proměnnými“, probíhá pouze omezená kontrola. Zajistěte,
aby hodnoty proměnných dávaly kruhový oblouk.